Design: Acionamentos e mecanismos
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
Atuador Elétrico
Atuador elétrico é um dispositivo que transforma energia elétrica em mecânica. Ele pode ser classificado, de acordo com o movimento resultante da sua ação, como linear ou rotativo.
O atuador elétrico linear converte o movimento rotativo de um motor à baixa voltagem contínua em movimento de translação também chamado linear (movimento de empurrar e puxar). Em geral, não possui rotação completa e utilizam uma combinação de elementos de transmissão para retrair ou estender o braço de acionamento.
O atuador elétrico rotativo também utiliza elementos de transmissão, conexões diretas ou cames na transferência de movimento, dependendo do torque de aplicação o movimento realizado é de rotação completa ou infinita.
É o mais usado de todos os tipos de atuadores, pois combina as vantagens da energia elétrica - baixo custo, facilidade de transporte, limpeza e simplicidade de comando – com sua construção simples, custo reduzido, grande versatilidade de adaptação às cargas dos mais diversos tipos e melhores rendimentos.
Motores de corrente continua (CC) ou Direct Current (DC)
São dispositivos que operam aproveitando todas as forças de atração e repulsão geradas por eletroímãs e imãs permanentes. Esse tipo de produto possui vários tamanhos e tensões nominais entre 1,5 a 48 volts. São indispensáveis para os projetistas do ramo da automação industrial e mecatrônica, como robótica, entretenimento, esteiras alimentadoras, relógio ponto, impressoras, etc.
Observação:
- A Corrente contínua (CC ou DC) possui um fluxo ordenado de partículas portadoras de carga elétrica que fluem na mesma direção. Ou seja, quando percorre um circuito, não altera seu sentido de circulação. Portanto, todo circuito CC possui polaridade positiva (+) e negativa (-).
FORÇA
Motor DC com caixa de redução para diminuir a velocidade e aumentar torque.
- Torque: 5,5 kgf.cm,
- Corrente: 90 mA
- Tensão: 24 V
- Potência: 7 W
- Velocidade: 35 RPMFORÇA E VELOCIDADE
Motor DC com alta potencia (Força) e rotação (Velocidade). Para uso em máquinas Fresadoras CNC.
- Torque: 6 Kgf.cm
- Corrente: 240 mA
- Tensão: 48 V
- Potência: 30 W
- Velocidade: 5000 RPMVELOCIDADE
Motor DC com baixo torque (Força) e
alta rotação (Velocidade). Para uso em drones ou Helicópteros.
- Torque: 0,3 kgf.cm
- Corrente: 360 mA
- Tensão: 12 V
- Potência: 16 W
- Velocidade: 6500 RPM



Motores de passos
Um motor de passo é um dispositivo eletromecânico que converte pulsos de energia elétrica em movimentos discretos. O eixo do motor gira em “passos” quando pulsos elétricos são aplicados na sequência correta. A rotação do motor tem relação direta com esses pulsos, a velocidade do motor de passo é definida pela frequência com que esses pulsos são enviados e o número de voltas do eixo é definido pela quantidade de pulsos. Um motor de passo é indicado nas situações em que há necessidade de um movimento controlado. Podem ser utilizados onde é preciso controlar o ângulo de rotação, velocidade, posição e sincronismo.
COMPACTO
- Torque: 1,8 kgf.cm
- Corrente por fase: 90 mA
- Passos: 64
- Ângulo do passo: 0,088º
- Número de fases: 4
- Tensão por Fase: 5 V
- Caixa de redução 1:64Veja um projeto: clique aqui
FORÇA E PRECISÃO
- Torque: 102 kgf.cm
- Corrente por Fase: 4,5A
- Passos: 200
- Ângulo do passo: 1.8º
- Número de fases: 2
- Tensão por Fase: 12 V
- Caixa de redução 3:1VELOCIDADE E POSIÇÃO
- Torque: 30 kgf.cm
- Corrente por Fase: 3A
- Passos: 200
- Ângulo do passo: 1.8º
- Número de fases: 2
- Tensão por Fase: 3,9V
- Sem Caixa de reduçãoVeja um projeto: clique aqui



Servo Motores
É uma máquina eletromecânica que tem movimento proporcional ao comando dado por meio de um sinal de controle. Por meio do controle de seu movimento direciona-se à posição pretendida e com velocidade monitorada. O eixo deste motor move-se em 180° (cento e oitenta graus) e, em alguns modelos, 360° (trezentos e sessenta graus). Esta alteração é possibilitada comumente em aeromodelismos. Assim, sua característica mais marcante é a capacidade que possui de movimentar o seu braço até determinada posição e mantê-lo. A especificação deste motor atende às seguintes características: tamanho, torque, velocidade, material das engrenagens, liberdade do giro do eixo, consumo.
Possui três componentes básicos:
1) Sistema atuador: é constituído por um motor elétrico, embora também possa encontrar servos com motores de corrente alternada, a maioria utiliza motores de corrente contínua. Também está presente um conjunto de engrenagens que forma uma caixa de redução com uma relação bem longa o que ajuda a amplificar o torque;
2) Sensor: normalmente é um potenciômetro solidário ao eixo do servo. O valor de sua resistência elétrica indica a posição angular em que se encontra o eixo. A qualidade desse vai interferir na precisão, estabilidade e vida útil do servo motor;
3) Circuito de controle: é formado por componentes eletrônicos discretos ou circuitos integrados e geralmente é composto por um oscilador e um controlador PID (controle proporcional integrativo e derivativo) que recebe um sinal do sensor (posição do eixo) e o sinal de controle e aciona o motor no sentido necessário para posicionar o eixo na posição desejada.
Projeto(s) relacionado(s)
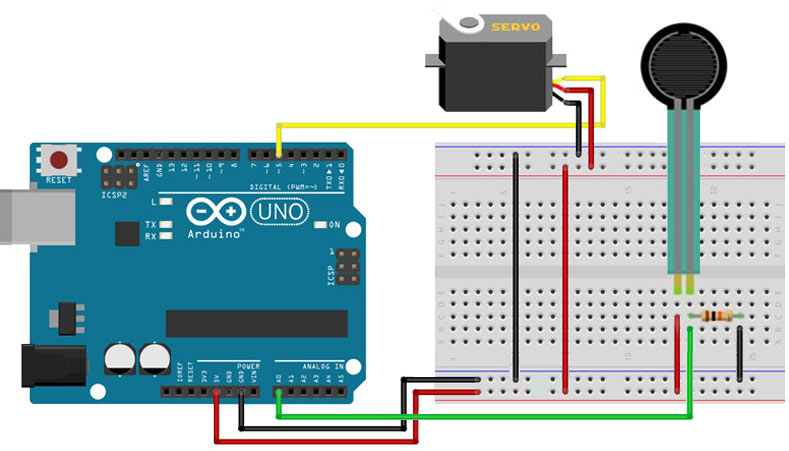
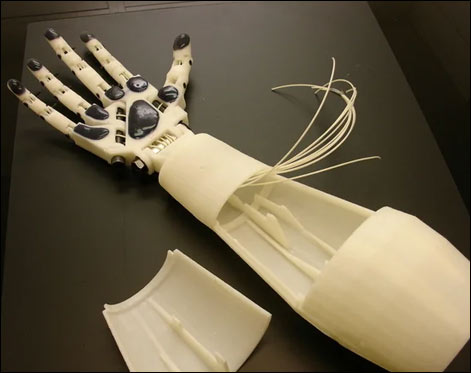
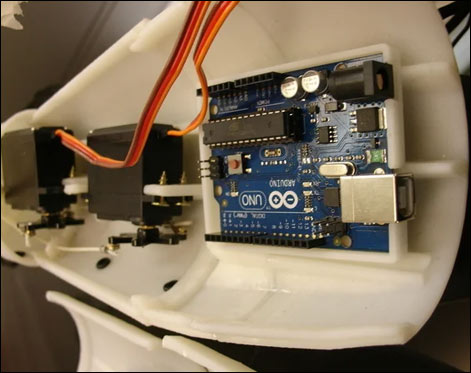
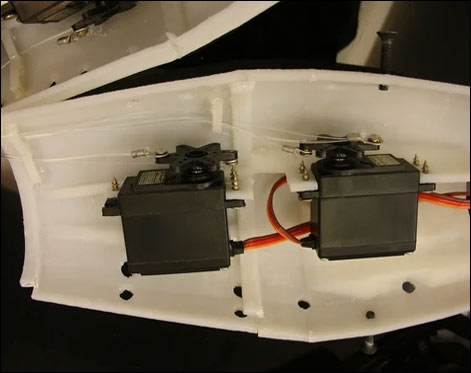
Hand robot InMoovProjeto de uma mão robótica biônica que utiliza Arduino Uno R3, Servo motores e Sensor de força resistivo para dirigir e controlar cada dedo separadamente. Ele foi desenvolvido em 2012 pelo escultor e designer francês Gael Langevin. Saiba mais em: O modelo para impressão 3D é disponibilizado em: https://www.thingiverse.com/thing:17773/files. A "Hand robot InMoov" é um subprojeto do "Robot InMoov", primeiro robô em tamanho real impresso em 3D de código aberto. Ele pode ser replicável em qualquer impressora 3D com uma área de 12 x 12 x 12 cm. Foi criado como uma plataforma de desenvolvimento para Universidades, Laboratórios e Hobistas. Saiba mais sobre "Hand robot InMoov" em: http://inmoov.fr/
// Projeto: Hand robot InMoov - movimenta um dedo da mão #include "Servo.h" const int Pino_Servo1 = 5; const int Pino_Resistivo1 = A0; int Leitura_Resistivo1; int Posicao_Servo1; Servo Meu_Servo1; void setup () { Serial.begin (57600); Meu_Servo1.write (30); // Mão fechada. Posicao_Servo1 = 30; Meu_Servo1.attach (Pino_Servo1); } void loop () { Leitura_Resistivo1 = analogRead (Pino_Resistivo1); Serial.print ("Analog reading = "); Serial.print (Leitura_Resistivo1); // Leitura bruta // --------- limites estabelecidos da leitura -------- // if (Leitura_Resistivo1 < 25) { Serial.println (" - Sem pressao"); } else if (Leitura_Resistivo1 < 30) { Serial.println (" - Toque leve"); } else if (Leitura_Resistivo1 < 50) { Serial.println (" - Aperto leve"); } else if (Leitura_Resistivo1 < 110) { Serial.println (" - Aperto médio"); } else if (Leitura_Resistivo1 < 200) { Serial.println (" - Aperto forte"); } delay (1000); AbreMao (Posicao_Servo1, 1); delay (3000); FechaMao (Posicao_Servo1, 1); delay (3000); } void AbreMao (int posicao, int servo) { for (; posicao < 130; posicao ++) { Meu_Servo1.write (posicao); if (analogRead (Pino_Resistivo1) > 30) { break; } } } void FechaMao () { Meu_Servo1.write (30); posicao = 30; }

|
[Voltar] |
[Avançar] |